
Autonomous Racing Software Stack Development for F1tenth Car
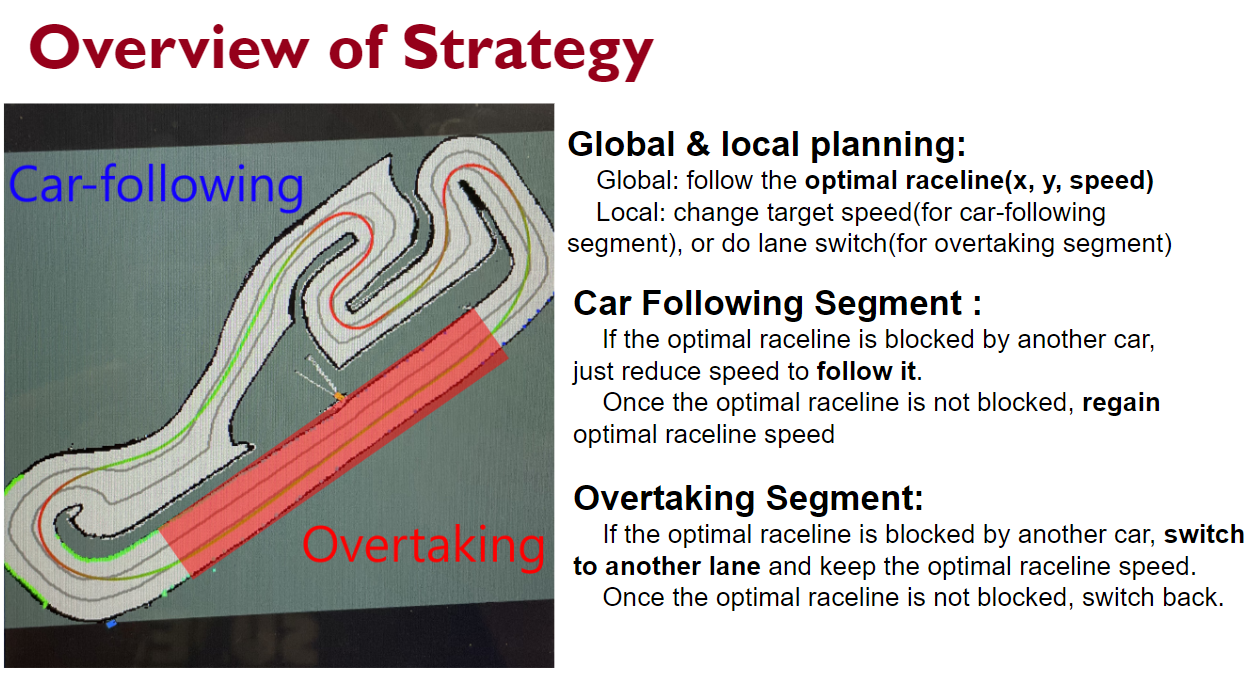
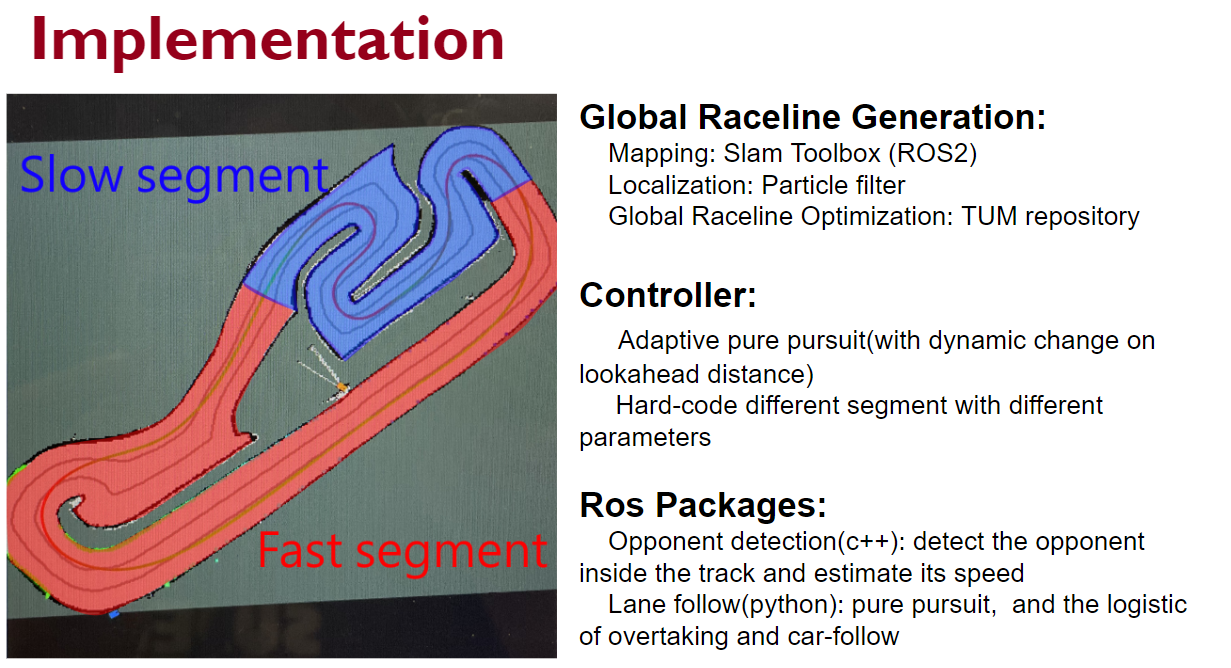
- Developed a pipeline including odometry calibration, mapping with SLAM, and global raceline optimization.
- Implemented dynamic occupancy grid for obstacle detection with C++, and lane switcher for overtaking.
- Deployed the algorithms on Jetson Xavier NX for a 1/10th scaled F1 car in ROS2, and won first place in the 10th F1tenth Autonomous World Grand Prix hosted in ICRA 2022.
Game-theoretic Objective Space Planning
H. Zheng, Z. Zhuang, J. Betz, R. Mangharam, “Game-theoretic Objective Space Planning”, International Conference on Robotics and Automation (ICRA) 2023. (Under review) arxiv
Main responsibilities in this project:
Designed a sampling-based lattice planner with different cost functions that evaluates each trajectory’s quality in terms of geometric properties and velocity profiles.
- Designed objective functions for two competing metrics(safety and aggressiveness) regarding the performance of the agent, which maps complex agent behaviors(like overtaking and car-following) to a 2-dimensional objective space.
- Optimized the cost weights with CMA-ES, constructed a Pareto front which contains the top-performing agents for the training of regret prediction model.
Model-based and Model-free RL Application for Autonomous Navigation
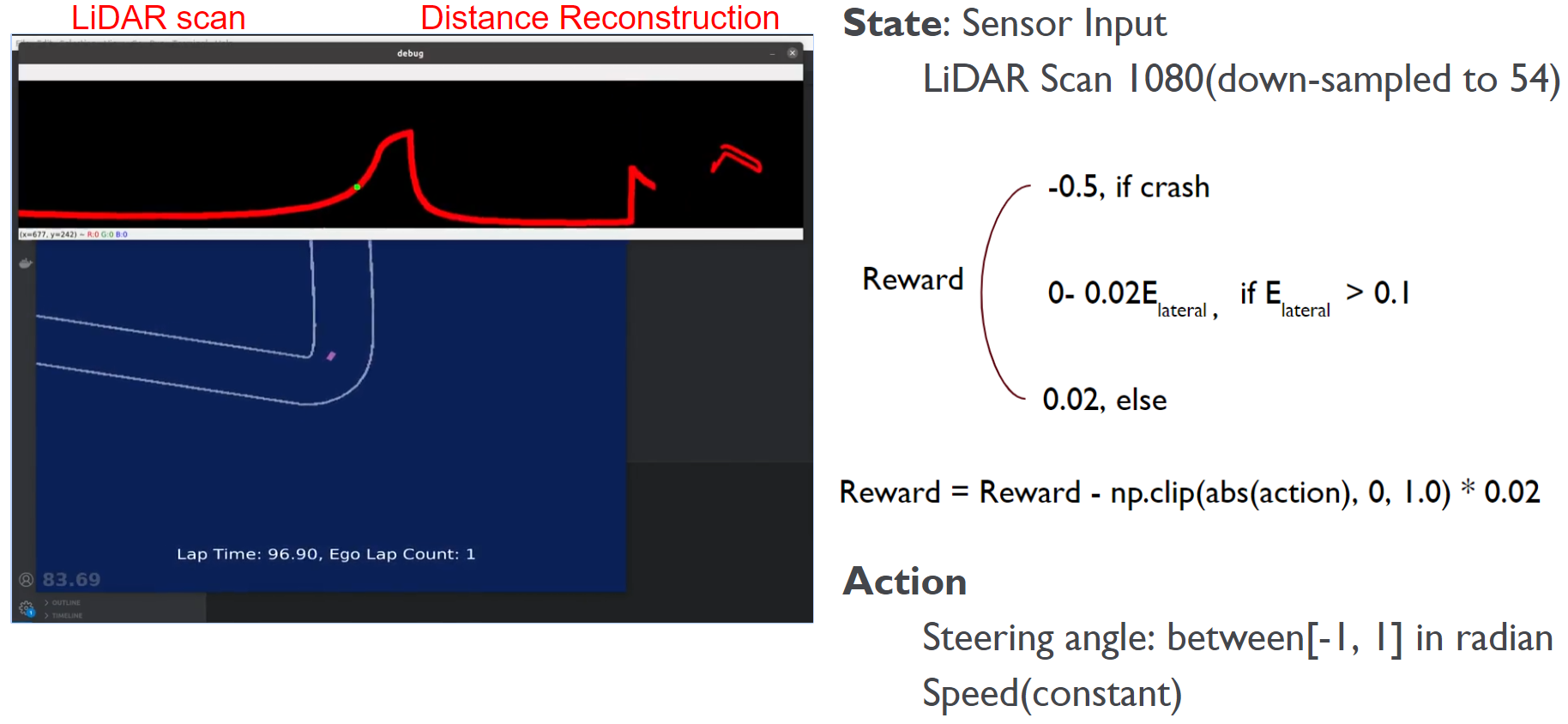
Implemented PPO and DreamerV2 in the f1tenth-gym environment with LiDAR scan as the observation.
- Introduced 1-D convolution to reduce the dimension of the observation, using data augmentation methods and shaped reward to narrow the sim2real gap.
- Experimented both in simulation and on a real car, finished the same track at an average speed of 4 m/s without collision.
Design and Strategy Optimization of an Air Hockey Robot for Man-machine Battle
Team co-Leader, Shanghai Jiao Tong University Sept. 2019 - Present
Supervisor: Xinjun SHENG, Xinyi LE
- Mechanical Structure and Electronic Control System
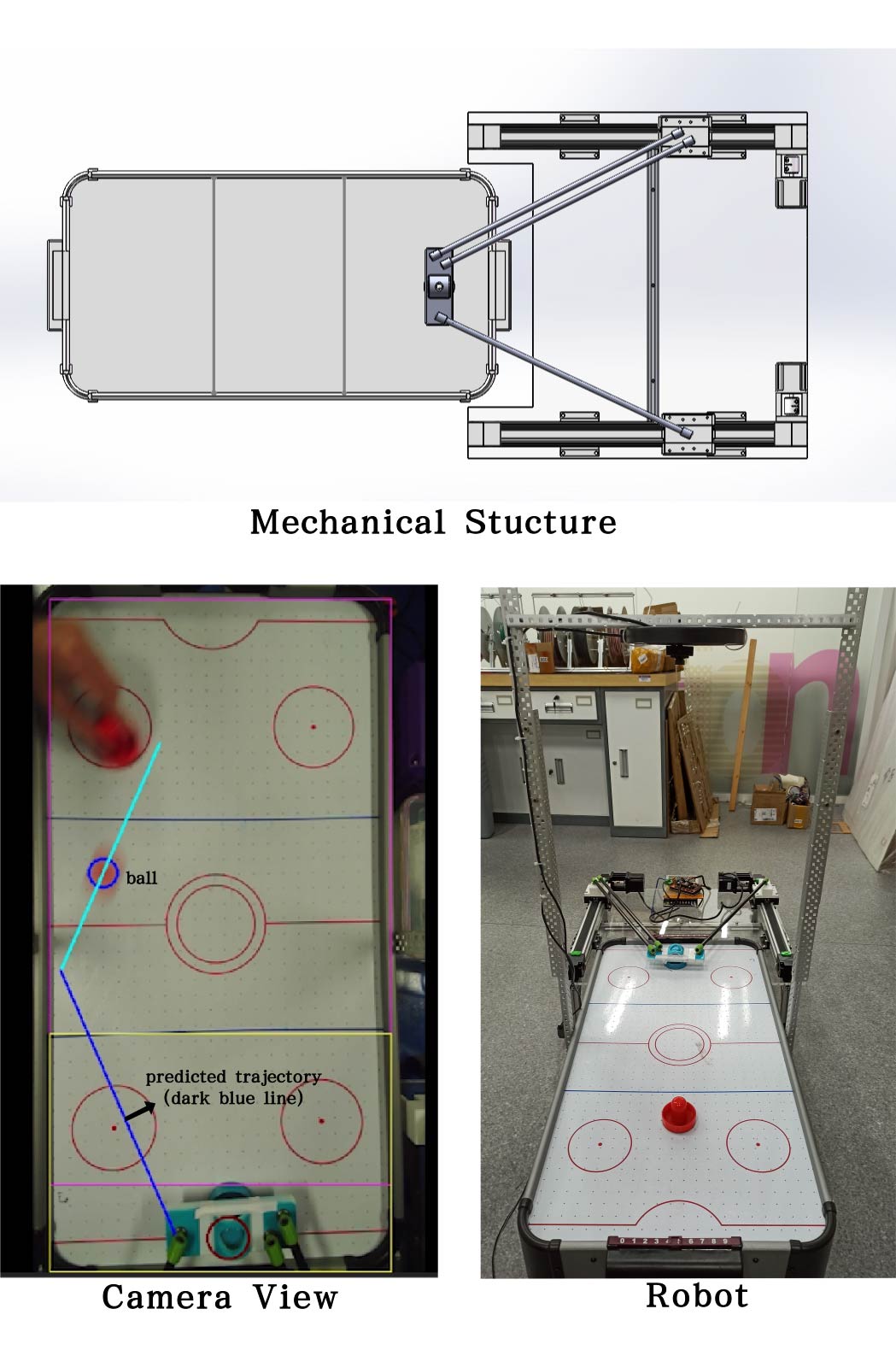
Designed a real-time vision capture system for the localization and trajectory prediction of the puck.
Created a two-link parallel mechanism instead of an XY-axis cross slide to reduce cumulative error.
Proposed an S-curve acceleration algorithm to improve the stability of stepper speed control.
- Algorithm
Modeled the table air-hockey game in simulation and optimized the attack-defense strategy of the robot with RL.
Incorporated Prioritized Replay DQN, Dueling DQN, and Noisy Net to improve final performance.
Introduced an AI to collect positive experience as a warm-up to speed up training, and vectorized the environment’s physical information as an improved embedding to make the sim-to-real transfer easier.
Grasp Perception and Planning for a Soft Gripper Based on Tactile Sensing
Graduation Thesis(Part of a Group Project), Jan. 2021 - Jun. 2021
Supervisor: Genliang CHEN
- Designed a closed-loop feedback control algorithm for a Fin-ray flexible clamp based on tactile sensing.
- Proposed a shape reconstruction algorithm based on Fin-ray proprioception model which can derive the current deformation from bend sensors. Obtained the local contour of an unknown object repeatedly by contact area analysis and successfully reconstruct the shapes of elliptical cylinders and irregular objects.
- Proposed an object classification algorithm using K-NN on different tactile feature maps generated during the grasping process. Developed an integrated GUI for user interaction and visualization.
Physically-based Simulation and Optimization of a two-DOF Chaotic Pendulum
Team Leader, Shanghai Jiao Tong University, Dec. 2019 - Mar. 2020
Supervisor: Genliang CHEN
- Computed both forward kinematics and inverse kinematics and visualized the motion of a two-DOF chaotic pendulum.
- Implemented genetic algorithm to optimize the structure of the pendulum for long-lived motion.
- Justified the conclusion through manufacturing a scale model.
Development of Photoelectric 6-DOF Rocker for Robot Teaching
Research Assistant, Shanghai Jiao Tong University Sept. 2018 - Apr. 2019
- Mastered the basic principle of the photoelectric sensor and determined the overall scheme of 6-dimensional rocker mechanism.
- Wrote communication program and signal test program such as signal receiving and verification.
- Executed motion control experiment of 3D virtual industrial robot which is realized by the six degree of freedom rocker.
Research and Development of Smart Car Slam with Lidar and Binocular Vision
Research Assistant, Shanghai Jiao Tong University Jul. 2018 - Sept. 2018
- Learned about the Hectorslam algorithm.
- Further research on the design of path planning for intelligent car.